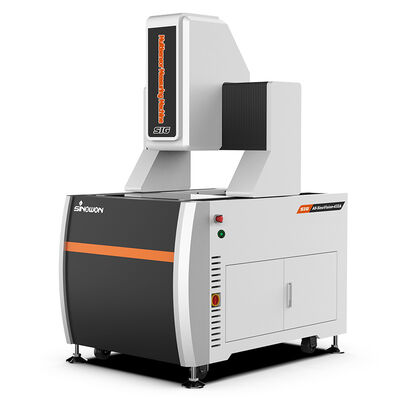
स्वचालित मैक्रोविकर्स कठोरता परीक्षक ऑटोविकी ZHV-WH0503

विकर्स विधि एक ऑप्टिकल माप प्रणाली पर आधारित है, यह एक हीरे के इंडेंटर का उपयोग करके प्रकाश भार की एक श्रृंखला निर्दिष्ट करता है जो एक इंडेंटेशन बनाता है जिसे मापा जाता है और कठोरता मान में परिवर्तित किया जाता है। यह विभिन्न प्रकार की सामग्रियों पर परीक्षण के लिए बहुत उपयोगी है, लेकिन परीक्षण नमूनों को छापों के आकार को मापने में सक्षम करने के लिए पॉलिश किया जाना चाहिए। विकर्स पैमाने में परीक्षण के लिए एक वर्ग आधार पिरामिड के आकार का हीरा प्रयोग किया जाता है। आमतौर पर भार बहुत हल्का होता है, जो 10 ग्राम से 1 किलोग्राम तक होता है, हालांकि "मैक्रो" विकर्स भार 50 किलोग्राम या उससे अधिक तक हो सकता है।
मैंपरिचय:
ऑटोविकी ZHV-WH श्रृंखला मशीन विजन, मोटर चालित X-Y प्लेटफ़ॉर्म और कंप्यूटर सॉफ़्टवेयर सिस्टम के साथ एक स्वचालित मैक्रो-विकर्स कठोरता परीक्षण प्रणाली है, इसका उपयोग धातुओं, सिरेमिक और कंपोजिट के विकर्स कठोरता पैमाने का परीक्षण करने के लिए किया जाता है। चूंकि विकर्स परीक्षण में परीक्षण इंडेंटेशन बहुत छोटा होता है, इसलिए यह विभिन्न प्रकार के अनुप्रयोगों के लिए उपयोगी है: फ़ॉइल जैसी बहुत पतली सामग्रियों का परीक्षण करना या किसी भाग की सतह को मापना, छोटे भाग या छोटे क्षेत्र, व्यक्तिगत मैक्रोस्ट्रक्चर को मापना, या एक भाग को काटकर और कठोरता में परिवर्तन की एक प्रोफ़ाइल का वर्णन करने के लिए इंडेंटेशन की एक श्रृंखला बनाकर केस हार्डनिंग की गहराई को मापना।
उत्पाद सुविधा:
- भार भार प्रणाली के लिए रैखिक विस्थापन उठाने की संरचना के साथ मैक्रो विकर्स कठोरता परीक्षकों का उत्कृष्ट बोल्डी।
- 0.5Kgf से 10Kgf तक सटीक छह-वर्ग मृत भार प्रणाली, और परीक्षण प्रक्रिया के दौरान स्वचालित लोडिंग, निवास और अनलोडिंग
- 3-कार्य-स्थिति, मैक्रोविकर्स हीरे के इंडेंटर के साथ स्थिर स्वचालित बुर्ज, 10x और 40x उद्देश्य एक ही फोकल प्लेन पर स्थापित हैं।
- 5MPixel कैमरे के साथ उच्च-परिभाषा ऑप्टिकल पथ इंडेंटेशन को तेज करता है, वीडियो आवर्धन 2000x से अधिक है, यह छोटे इंडेंटेशन को आसानी से मापता है।
- धातु के आकार 110x100 मिमी और मापने वाले स्ट्रोक के साथ मोटर चालित X-Y प्लेटफ़ॉर्म 50x50 मिमी है, इसे स्वचालित रूप से नमूने की विकर्स कठोरता का परीक्षण करने के लिए प्रोग्राम किया जा सकता है।
- स्मार्ट परीक्षण कार्यों के साथ शक्तिशाली स्वचालित विकर्स परीक्षण सॉफ़्टवेयर ATS-100 विंडोज ऑपरेटिंग सिस्टम, वर्ड, एक्सेल, पीडीएफ और अन्य अनुकूलित आउटपुट रिपोर्ट उपलब्ध हैं।
विनिर्देश:
| कमोडिटी |
स्वचालित मैक्रोविकर्स कठोरता परीक्षक |
| मॉडल |
ऑटोविकी ZHV-WH0503 |
ऑटोविकी ZHV-WH1005 |
ऑटोविकी ZHV-WH3010 |
ऑटोविकी ZHV-WH5010 |
| कोड# |
821-170-0503 |
821-170-1005 |
821-170-3010 |
821-170-5010 |
| लोडिंग बल |
एन |
0.3; 0.5; 1.0; 2.0; 3.0; 5.0 |
4.9; 9.8; 19.6; 29.4; 49.0; 98.0 |
1.0; 3.0; 5.0; 10.0; 20.0; 30.0 |
1.0; 5.0; 10.0; 20.0; 30.0; 50.0 |
| Kgf |
2.94; 4.9; 9.8; 19.6; 29.4; 49.0 |
0.5; 1.0; 2.0; 3.0; 5.0; 10.0 |
9.8; 29.4; 49.0; 98.0; 196; 294 |
9.8; 49.0; 98.0; 196; 294; 490 |
| उद्देश्य |
10×,40× |
10×,40× |
10×,40× |
10×,20× |
| लोडिंग सिस्टम |
स्वचालित |
| मोटर चालित X-Y स्टेज |
आकार L के साथ मिनी-स्टेप-मोटर: 255*W:205mm |
| X-Y स्टेज स्ट्रोक |
50x50mm |
| न्यूनतम कदम |
0.625um |
| भाषा |
अंग्रेज़ी |
| लोडिंग समय |
1~60s समायोज्य |
| बुर्ज |
स्वचालित-बुर्ज |
| उद्देश्य |
10×, 40× |
| Z-अक्ष फोकसिंग सिस्टम |
क्रॉस हैंडव्हील द्वारा मैनुअल-फोकस |
| न्यूनतम माप इकाई |
0.025 μm |
| नमूने की अधिकतम ऊंचाई |
170mm |
| इंस्ट्रूमेंट थ्रोट |
135mm |
| कार्यकारी मानक |
GB/T 4340.2; ISO 6507; ASTM E92; JIS Z2244 |
| बिजली की आपूर्ति |
220 VAC, 50/60 हर्ट्ज |
| आयाम (L×W×H) |
(540*240*630)mm |
| पैकिंग आयाम |
(620*485*800)mm |
| स्वचालित परीक्षण सॉफ्टवेयर |
ATS-100 छवि विश्लेषण और माप सॉफ्टवेयर (डोंगल और सीडी) |
| कैमरा प्रकार |
5 मेगापिक्सल एचडी कैमरा |
| कैमरा एडाप्टर ट्यूब |
ZHV-WH1005-1X |
| मोशन कंट्रोलर |
X-Y स्वचालित प्लेटफ़ॉर्म नियंत्रण प्रणाली |
| मॉनिटर |
21.5” HDMI मॉनिटर |
| शुद्ध वजन |
80Kg |
| सकल वजन |
105Kg |
विकर्स और नूप माप सॉफ्टवेयर का परिचय
सॉफ्टवेयर के फायदे:
1. यह पैनोरमिक स्कैनिंग का एहसास कर सकता है, उत्पाद के समग्र ग्राफिक्स को कंप्यूटर पर स्कैन कर सकता है, किसी भी स्थिति का चयन कर सकता है, और उत्पाद स्वचालित रूप से आवश्यक स्थिति में चला जाएगा।
2. यह 17 तरीकों की पथ योजना का समर्थन कर सकता है, किसी भी संख्या को सेट कर सकता है, जैसे 30 बिंदु निर्देशांक, स्टार्ट पर क्लिक करें, और मशीन स्वचालित रूप से मैनुअल ऑपरेशन, स्वचालित लोडिंग, स्वचालित फोकसिंग और स्वचालित माप के बिना 30 बिंदु माप पूरा करेगी।
3. वैकल्पिक Z-अक्ष मोटर और ऑटो-फोकस सिस्टम से लैस, फोकल लंबाई को मैन्युअल रूप से खोजने की कोई आवश्यकता नहीं है, और मशीन स्वचालित रूप से फोकस करती है। सभी चरण मैनुअल माप त्रुटियों से बचने के लिए सॉफ्टवेयर द्वारा पूरे किए जाते हैं।
बुनियादी कार्य:
● इंडेंटेशन छवि की स्वचालित मान्यता क्षमता अग्रणी है, और पता लगाने की दक्षता, स्थिरता और पता लगाने के परिणामों की सटीकता अधिक है।
● दो प्रकार का अंशांकन: ऑप्टिकल अंशांकन, (मैनुअल / स्वचालित) कठोरता ब्लॉक अंशांकन। कठोरता ब्लॉक कई औसत, मनमाना कई मानक ब्लॉक और खंडित अंशांकन और पसंदीदा माप का समर्थन करता है।
● स्वचालित माप के अलावा, तीन मैनुअल माप विकल्प हैं: चार तरफा माप, विकर्ण माप और चार-बिंदु माप (चार शीर्ष चयन का क्रम मनमाना हो सकता है)।
● तीन प्रकार के इंडेंटेशन चिह्न समर्थित हैं: "रेक्टेंगल", "रेड क्रॉस" और "सर्कुलर"।
● मैनुअल माप के दौरान, इसमें आवर्धक कांच का कार्य होता है, जो इंडेंटेशन शीर्ष स्थिति को खोजने के लिए सुविधाजनक है;
● अद्वितीय कीबोर्ड शॉर्टकट फ़ंक्शन चयनित शीर्ष को जल्दी से स्थानांतरित कर सकता है ताकि माप संचालन अधिक कुशल हो सके।
● इंडेंटेशन विकर्ण की पिक्सेल दूरी और भौतिक दूरी प्रदान करें, और वास्तविक समय में वर्तमान भार के तहत HV / HK मान की गणना करें।
● बुर्ज का स्वचालित स्विचिंग (उद्देश्य लेंस और इंडेंटर का स्विचिंग)।
● कंप्यूटर पर इंडेंटेशन वीडियो प्रदर्शित करने के लिए 5 मिलियन डिजिटल कैमरे। यह छवियों को कैप्चर और स्टोर कर सकता है।
● वर्तमान कठोरता परीक्षक की स्थिति को वास्तविक समय में प्रदर्शित और अपडेट करें: वर्तमान इंडेंटर / उद्देश्य लेंस, लोडिंग होल्डिंग समय, लोडिंग बल, आदि।
● दो बिंदुओं के बीच की दूरी को मैन्युअल रूप से मापा जा सकता है; वीडियो या छवि पर एक ही समय में कई समूहों की दूरी भी प्रदर्शित की जा सकती है।
● विभिन्न रिज़ॉल्यूशन, विभिन्न उद्देश्य लेंस और विभिन्न भार के मामले में, सॉफ़्टवेयर स्वचालित रूप से सर्वोत्तम अंशांकन गुणांक का चयन करेगा।
● सभी परीक्षण बिंदु जानकारी को अलग से या ग्राहक की आवश्यकताओं के अनुसार पहचाना और चिह्नित किया जा सकता है। परीक्षण बिंदु पहचान जानकारी को आसान क्वेरी के लिए परीक्षण मान अनुक्रम तालिका और इंडेंटेशन आरेख में प्रदर्शित किया जाएगा। यह फ़ंक्शन बाद के विश्लेषण और प्रसंस्करण के लिए बहुत महत्वपूर्ण है।
● GB, DIN, ISO, ASTM और अन्य कठोरता रूपांतरण मानकों का संदर्भ लें: विकर्स HV, नूप HK; रॉकवेल: HRC, HRA, HRB, HRD, HRE, HRF, HRG, HRK; सतह रॉकवेल: HR15N, HR30N, HR45N, HR15T, HR30T, HR45T; ब्रिनेल HBS और ब्रिनेल HBW जैसे कठोरता मानों के बीच पारस्परिक रूपांतरण का एहसास करें।
● कठोर परत पथ अनुक्रम को मापते समय, कई लचीले इनिशियलाइज़ेशन सेटिंग मोड होते हैं, जो स्वचालित रूप से पिछले पथ अनुक्रम को सहेजते और आयात करते हैं; माप पथ को इच्छानुसार फिर से लोड करने के लिए भी सहेजा जा सकता है।
● पथ अनुक्रम माप परिणाम स्वचालित रूप से संबंधित कठोर परत गहराई मान और कठोरता परिवर्तन वक्र उत्पन्न करते हैं।
● माप डेटा के लिए कई विश्लेषण मोड का चयन किया जा सकता है; सभी परिणामों को ग्राफिक रिपोर्ट में सेट किया जा सकता है।
● रिपोर्ट सामग्री और प्रारूप को लचीले ढंग से सेट किया जा सकता है, और वर्ड और एक्सेल दस्तावेज़ स्वचालित रूप से उत्पन्न किए जा सकते हैं।
● पासवर्ड और प्रबंधन प्राधिकरण सेट किया जा सकता है: साधारण ऑपरेटर केवल सेट सेटिंग्स के अनुसार कठोरता को माप सकते हैं।
● अंतर्निहित मानक कठोरता मान रूपांतरण उपकरण तालिका के अनुसार मापा गया कठोरता मान स्वचालित रूप से परिवर्तित कर सकता है और इसे परिणाम तालिका में सूचीबद्ध कर सकता है।
उन्नत कार्य:
● स्वचालित फोकसिंग फ़ंक्शन। इंडेंटेशन का स्वचालित फोकसिंग महसूस किया जा सकता है, और एकल इंडेंटेशन का फोकसिंग समय 2-5 सेकंड है। (इस फ़ंक्शन को महसूस करने के लिए, ZHV-VH1010 को मोटर Z-अक्ष और ऑटो-फोकस सिस्टम से लैस होना चाहिए)
● मार्ग योजना फ़ंक्शन। दूरी माप फ़ंक्शन के विस्तार के रूप में, मापे जाने वाले पथ के 17 मोड की सटीक योजना को छवि पर माउस से क्लिक करके पूरा किया जाता है।
1) नि: शुल्क बिंदु चयन: छवि के किसी भी स्थिति पर क्लिक करें जिसे मापा जाने वाला पथ बनना है।
2) मनमाना दिशा: किसी भी शुरुआती बिंदु और किसी भी दिशा में सीधी रेखा खंड का चयन करें।
3) एज नॉर्मल: किनारे के पास क्लिक करें ताकि स्वचालित रूप से सामान्य रेखा खंड उत्पन्न हो सकें।
4) दो बिंदु सामान्य: केंद्र सामान्य रेखा खंड उत्पन्न करने के लिए किनारे के दो सिरों का चयन करें।
5) कोण द्विभाजक: कोण उत्पन्न करने के लिए तीन बिंदु कोण द्विभाजक खंडों का निर्माण करते हैं।
6) वृत्ताकार मार्ग: दो-बिंदु केंद्रण / त्रिज्या, समय में एक पथ उत्पन्न करना।
7) एज कंटूर: किनारे के पास क्लिक करें ताकि किनारे के साथ स्वचालित रूप से एक पथ उत्पन्न हो सके।
8) एज इक्विडिस्टेंट: समान दूरी रेखा खंड उत्पन्न करने के लिए किनारे के साथ दूरी पर क्लिक करें।
9) आरा दांत तरंगरूप: अवधि, दांत की ऊंचाई और दांत की समरूपता को मात्रात्मक रूप से सेट किया जा सकता है।
10) दो बिंदु का केंद्र: मापा जाने वाले पथ के रूप में मध्यबिंदु उत्पन्न करने के लिए छवि पर दो बिंदुओं का चयन करें।
11) लाइन: किसी भी शुरुआती बिंदु पर क्लिक करें, किसी भी दिशा में सीधी रेखा खंड, और बीच में चर दूरी।
12) मल्टीलाइन: मल्टीलाइन वेपॉइंट।
13) ज़िगज़ैग: ज़िगज़ैग मल्टीलाइन।
14) अंतर्वेशन: दो बिंदुओं के बीच पथ बिंदुओं की एक निश्चित संख्या / दूरी डालें।
15) मैट्रिक्स: आयताकार सरणी का पथ बिंदु।
16) पहिया: पहिया पथ बिंदु।
17) रिंग: वृत्ताकार पथ बिंदु।
● प्रदान करें इंडेंटर / लेंस ऑफसेट अंशांकन फ़ंक्शन इंडेंटर और लेंस के बीच यांत्रिक विचलन को खत्म करने और सिस्टम की समग्र त्रुटि को सही करने के लिए, ताकि कठोरता परीक्षण परिणामों की सटीकता में सुधार हो सके।
● एज स्कैनिंग फ़ंक्शन। XY स्वचालित प्लेटफ़ॉर्म की गति के माध्यम से, निर्दिष्ट वस्तु के किनारे को स्कैन किया जा सकता है और वस्तु के किनारे की रूपरेखा खींची जा सकती है।
● पैनोरमिक स्प्लिसिंग फ़ंक्शन। "पैनोरमिक स्कैनिंग" फ़ंक्शन के माध्यम से, आप एक निर्दिष्ट सीमा के भीतर एक पैनोरमा प्राप्त कर सकते हैं और मानचित्र पर कोई भी पथ योजना बना सकते हैं।
● क्षेत्रीय मोड और निरंतर परीक्षण समारोह। एक ही दृश्य में मौजूद हो सकने वाले कई इंडेंटेशन के लिए, क्षेत्र मोड का चयन किया जा सकता है, और प्रत्येक माप के दौरान केवल सेट रेंज के भीतर इंडेंटेशन पर विचार किया जाता है। जब निरंतर परीक्षण के दौरान क्षेत्र मोड चालू होता है, तो एक ही दृश्य में कई इंडेंटेशन के कारण होने वाले परीक्षण व्यवधान से बचा जा सकता है। सतह सुधार समारोह।
● सतह सुधार समारोह। यह ASTM E384 मानक की तालिका I और तालिका II का अनुपालन करता है, और गेंदों और छड़ों जैसे घुमावदार भागों के लिए परीक्षण और सुधार आवश्यकताओं को प्रदान करता है।
● कोण सुधार समारोह। प्लेटफ़ॉर्म और कैमरे के बीच कोण विचलन को कोण के स्वचालित सुधार के माध्यम से समाप्त किया जा सकता है, और प्लेटफ़ॉर्म की स्थिति सटीकता में सुधार किया जा सकता है।
● फ्रैक्चर टफनेस फंक्शन। फ्रैक्चर टफनेस के फ़ंक्शन की जाँच की जा सकती है ताकि इंडेंटेशन फ्रैक्चर टफनेस डेटा को मापा जा सके।
● मल्टी सैंपल पैनोरमिक स्प्लिसिंग फंक्शन। पैनोरमिक स्प्लिसिंग को एक ही समय में कई नमूनों के लिए किया जा सकता है, और फिर इन पैनोरमा पर पथ योजना बनाई जा सकती है। अंत में, निरंतर परीक्षण पूरा हो गया।
मोटर चालित X-Y प्लेटफ़ॉर्म VMP-505 का विनिर्देश:
● स्टेप-मोटर सिस्टम के साथ स्वचालित XY प्लेटफ़ॉर्म: एयरोस्पेस ग्रेड प्रोसेसिंग तकनीक
● बेहतर सीलिंग प्रदर्शन दीर्घकालिक वसूली सटीकता की स्थिरता सुनिश्चित करता है
● प्लेटफ़ॉर्म आकार: 255mmx205mm
● XY दिशा में अधिकतम विस्थापन: 50X50mm आवश्यकताएं), न्यूनतम कदम: 0.625um
● उत्तर सटीकता: एकतरफा पूर्ण सीमा ≤ 10um
● स्कैनिंग संपूर्ण पाठ्यक्रम ≤ 20um
● वैकल्पिक बड़ा मोटर चालित X-Y प्लेटफ़ॉर्म VMP1111
● X-Y यात्रा आकार: 110x110mm और प्लेटफ़ॉर्म आकार: 310mmx255mm

 आपका संदेश 20-3,000 अक्षरों के बीच होना चाहिए!
आपका संदेश 20-3,000 अक्षरों के बीच होना चाहिए!